Monolithic Units: Actuation, Sensing, and Simulation for Integrated Soft Robot Design
2026A monolithic actuator–lattice–sensor building block (MU) with simulation-informed optical waveguide placement to preserve mechanical response.
A monolithic actuator–lattice–sensor building block (MU) with simulation-informed optical waveguide placement to preserve mechanical response.
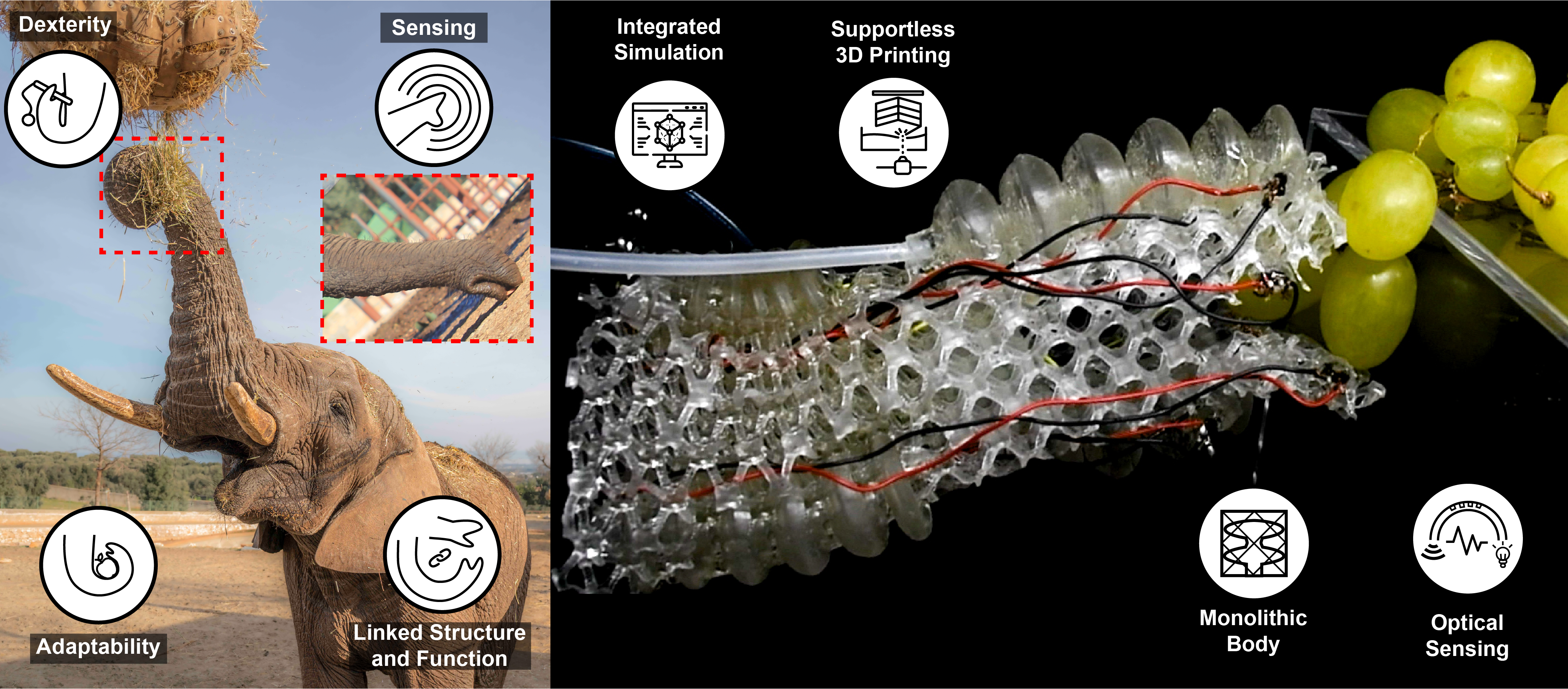
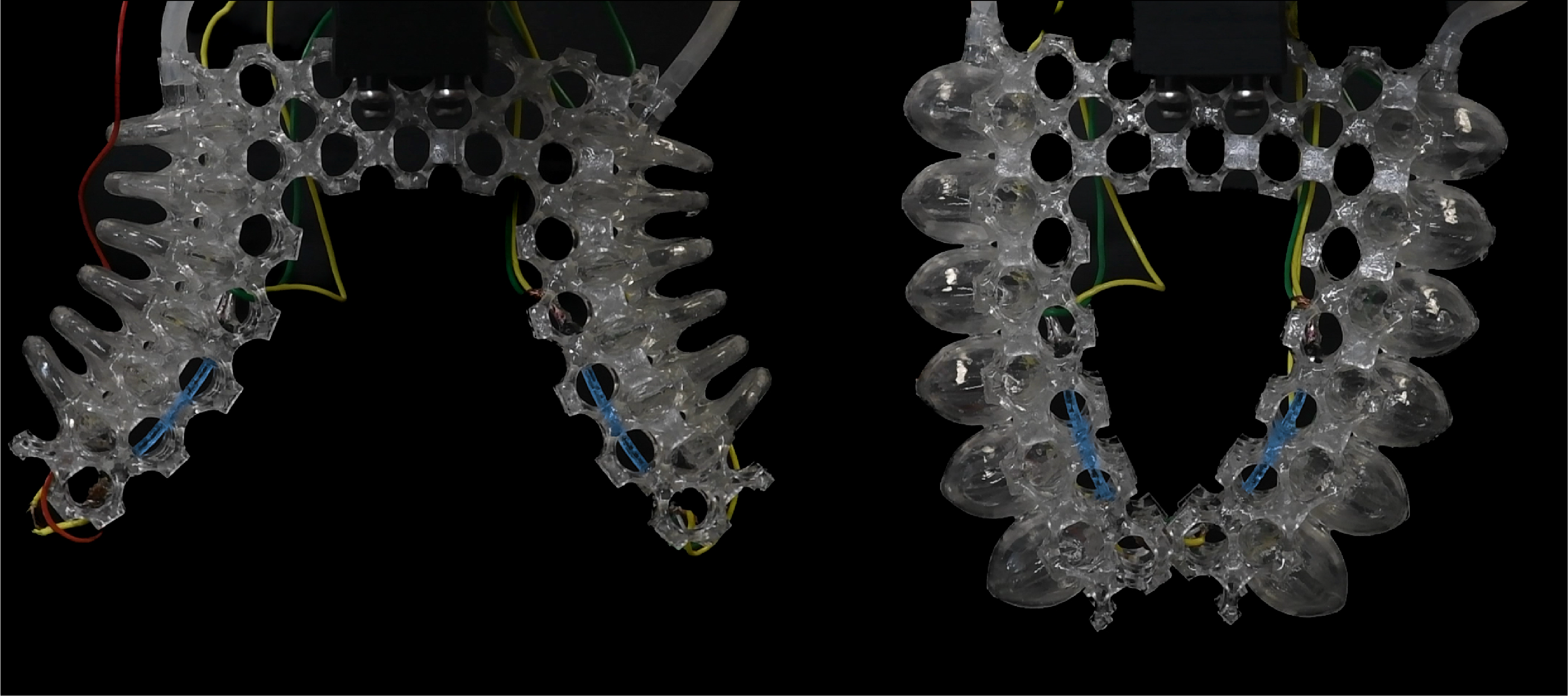
A monolithic elephant-inspired gripper integrating optical sensing for contact-rich manipulation.
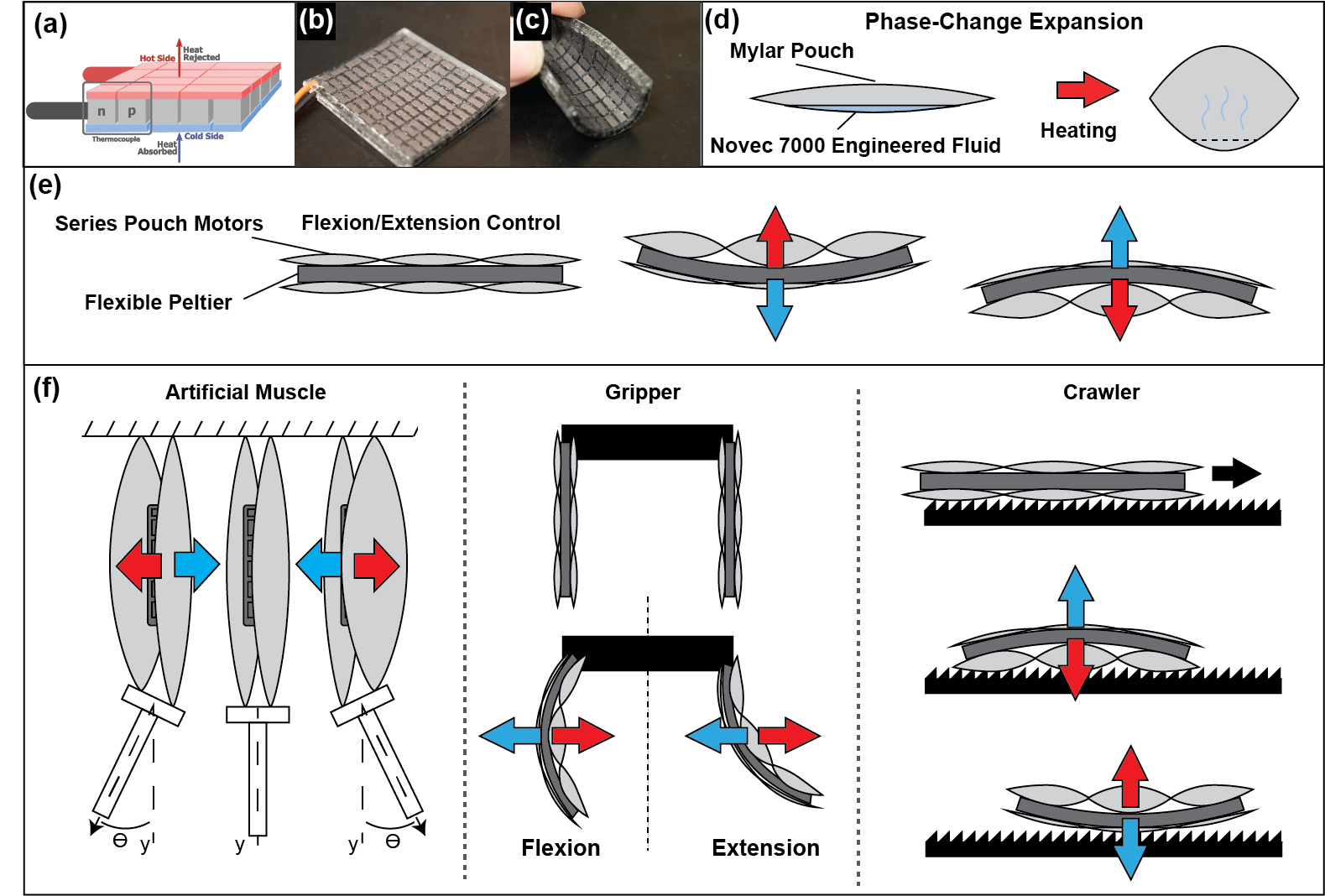
A bidirectional soft actuator architecture using agonist–antagonist pouch motors and thermoelectric control to achieve tunable force, stiffness, and dynamic response.
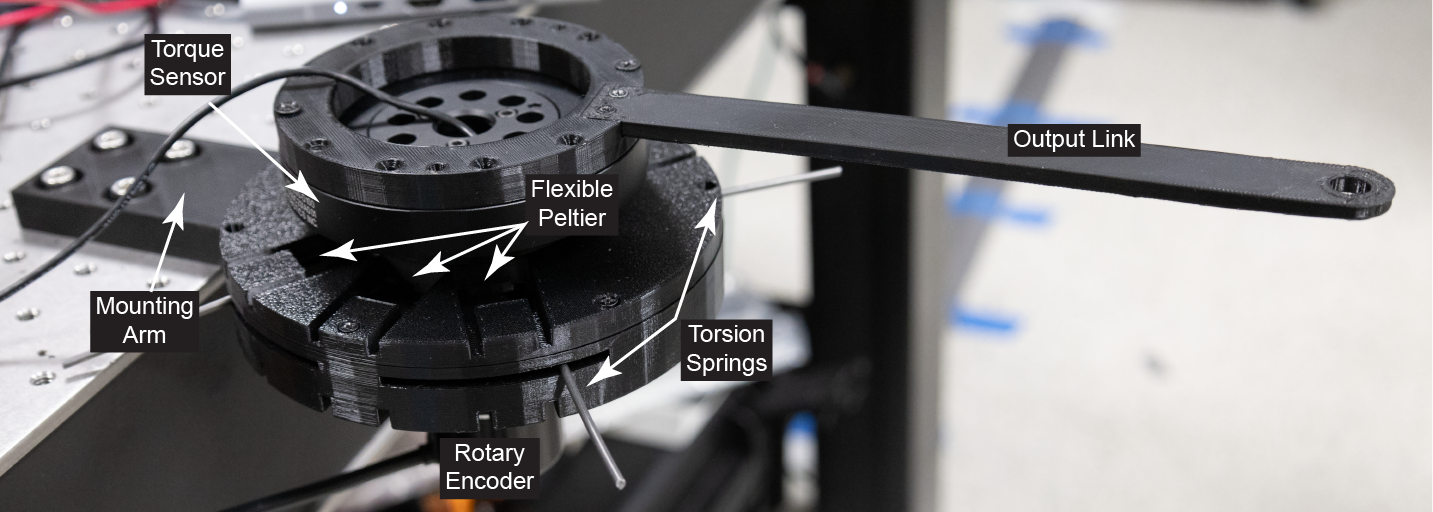
A thermoactive variable impedance module using phase-transition polycaprolactone to tune shear stiffness via embedded thermoelectric actuation.
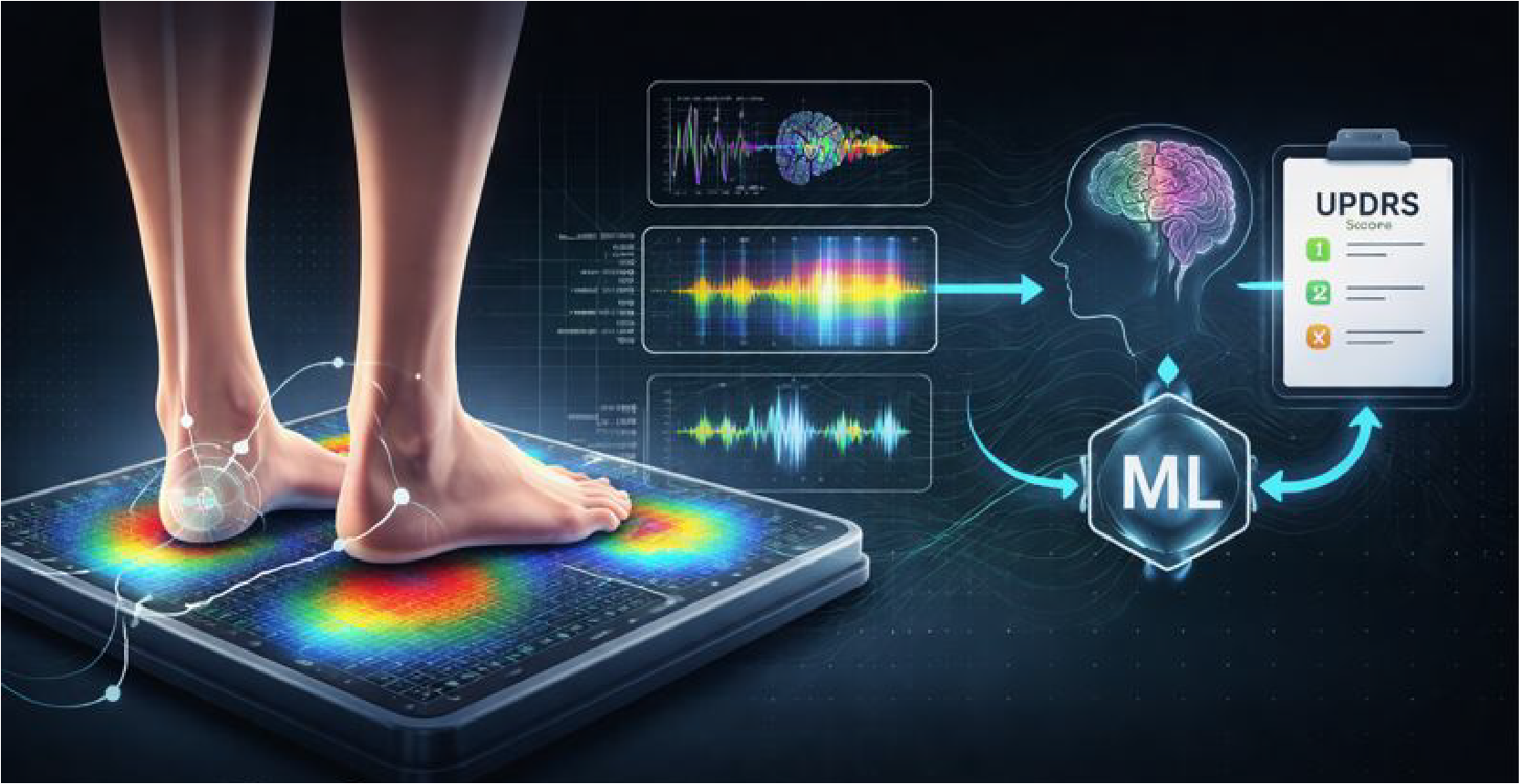
Force-plate signals → interpretable features and models to estimate UPDRS motor symptom severity.