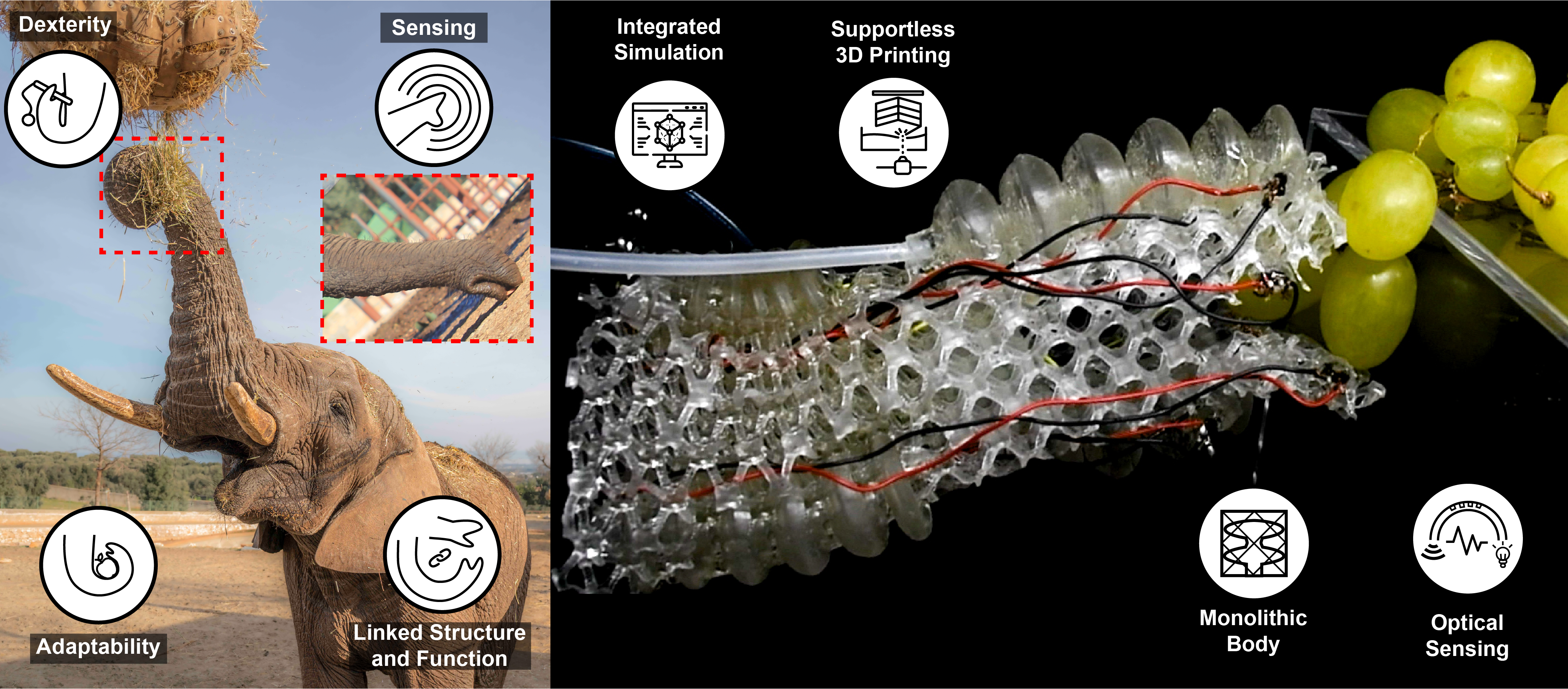
Monolithic Units: Actuation, Sensing, and Simulation for Integrated Soft Robot Design
2026
A monolithic actuator–lattice–sensor building block (MU) with simulation-informed optical waveguide placement to preserve mechanical response.